Unmanned Automated Agricultural Machinery
Leveraging a Range of Technologies to Achieve Completely Unmanned Operation Under Remote Monitoring
The Roadmap and Where Kubota Stands Now
Solving the various issues faced by farmers and achieving sustainable farming will require smart agriculture that utilizes robotics, AI, and IoT. Kubota is promoting labor-saving through unmanned and automated agricultural machinery as an initiative to move smart agriculture forward.
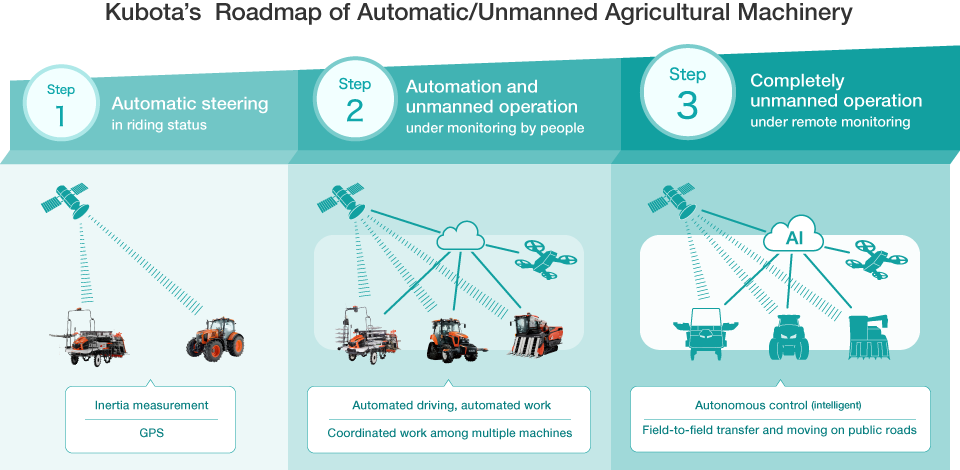
To achieve the goal of completely unmanned operation under remote monitoring, Kubota has drawn up a three-step roadmap that focuses on automation using positioning information from a Global Navigation Satellite System (GNSS). At the current point, Step 2, “Automation and unmanned operation under monitoring by people,” has been achieved through the release of tractors, combine harvesters, and rice transplanters. Development is currently under way for technologies in completely unmanned operation under remote monitoring, as outlined in Step 3.
Kubota’s Vision for Elements Required for Unmanned and Automated Machinery
The Kubota concept of unmanned automated agricultural machinery is to have machines perform the work of skilled farmers automatically and without control by a person. This goes beyond simply automating farm work—it aims for functionality that can perform tasks at the same level as seasoned farm experts, working reliably to achieve labor-saving and advanced efficiency without the need for advanced skills.
The three key elements for achieving this are automatic operation and steering, a system for detecting obstacles and people, and precision in farm work through automated operation. Kubota has leveraged various technologies to achieve all three of these with the tractors, combine harvesters, and rice transplanters in its Agri Robo series of unmanned automated agricultural machinery.
MPC Steering Control Technology Uses Precise Calculations to Guide Machines Safely
In recent years, there has been a growing need for automatic driving and steering technologies that follow work routes accurately in the hopes of reducing fatigue from farm work, improving efficiency, and making work more even and precise.
Some of Kubota’s tractors employ Model Predictive Control (MPC) in their steering control algorithms. This control technology calculates the amount of control required at each point in time using a control target prediction model (tractor motion equation) and optimization solver*1.
Tractor steering control works by estimating the tractor’s trajectory to the target path, selecting the optimal trajectory, and determining the amount of steering wheel movement (figure). Because the Electronic Control Unit (ECU)*2 installed in the tractor has limited processing speed, memory and other computing resources, Kubota developed a unique algorithm that reduces computing costs when implementing MPC.
- *1.An algorithm that calculates the most efficient and effective solution from multiple selections
- *2.A compact computer that handles electronic control for a vehicle
-
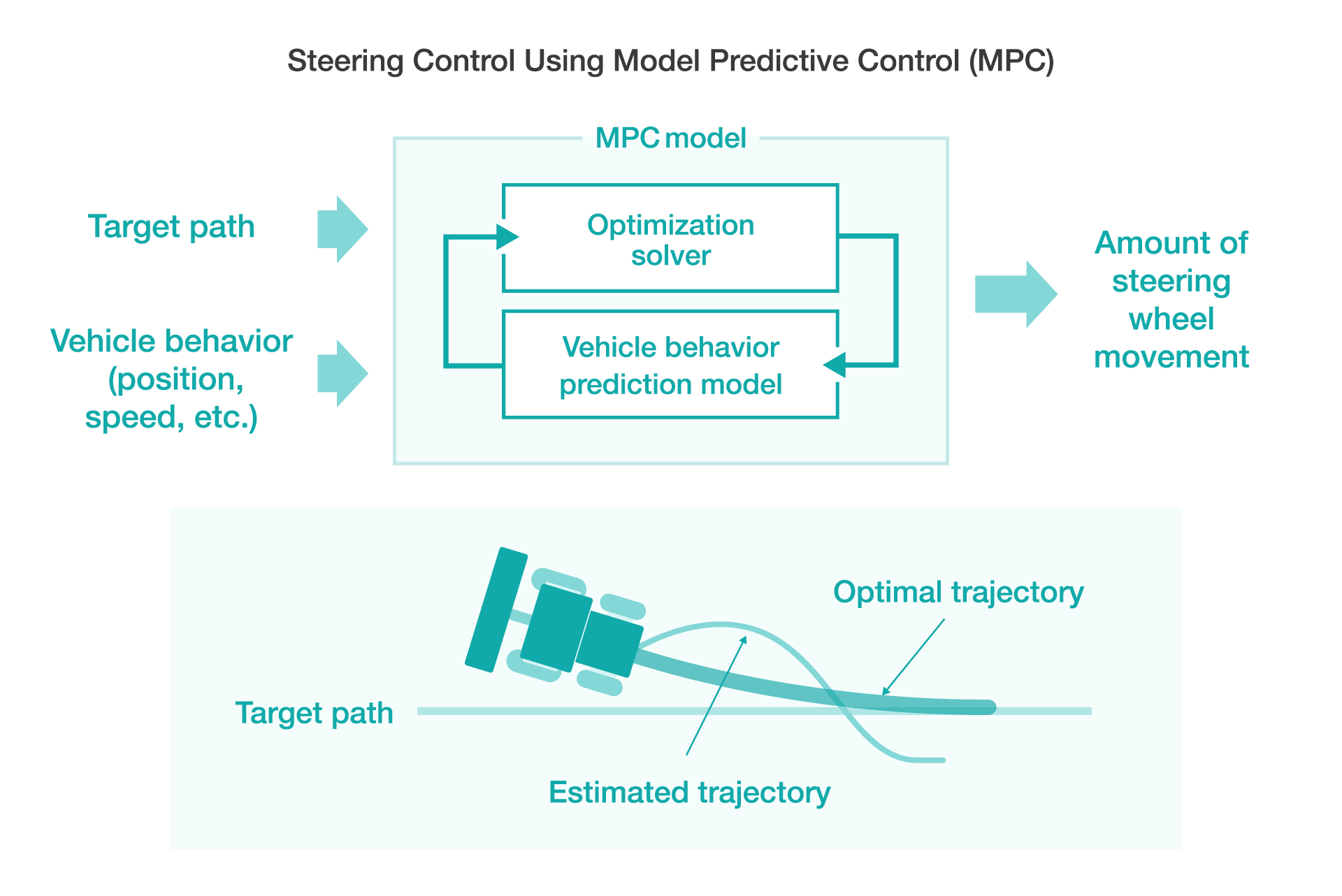
It estimates the travel trajectory to the target path and uses the MPC model to calculate the amount of steering required to obtain the optimum trajectory.
Supports a Wide Range of Agricultural Work
Because tractors are used for a variety of tasks with all kinds of implements mounted on both the front and rear, their steering load and weight balance will vary with the work they do. For this reason, when building the algorithm for MPC steering control, vehicle behavior for the tractor controlled by the algorithm is modeled so that there is no impact from differences in steering load and weight balance. This has resulted in a steering control algorithm that can be shared across a wide range of tasks in farming.
Support for Curved Paths
Agricultural work is generally performed on straight paths, but there are times when field shapes and slopes require work on curved paths. MPC control constantly estimates movement trajectory in the direction the vehicle is traveling and determines the optimum amount of steering, enabling machinery to automatically drive with high accuracy even on paths with changing curvature.
Support for a Wide Range of Speeds
Tractors run at a wide range of speeds, sometimes slow and sometimes fast. Because MPC control excels at anticipating, it can estimate the trajectory toward a target path and the time required for convergence, enabling creation of a steering control algorithm that takes into account variances in speed. This enables smooth automatic steering across a wide range of speeds.
Safety Ensured through a Human and Obstacle Detection System
With unmanned automated agricultural machinery, safety measures are an absolute must. Kubota’s machinery employs a variety of technologies to ensure safety.
To detect obstacles and abnormalities while moving, the Agri Robo tractor is equipped with a laser scanner and ultrasonic sonar, while the Agri Robo rice transplanter features ultrasonic sonars in eight locations. The machines are designed to stop moving when they detect people or obstacles above or below, to the left or right, or in front or behind.
-

The Agri Robo tractor’s laser scanner (left) and ultrasonic sonar (right).
In addition, the Agri Robo combine harvester is equipped with an AI camera and millimeter wave radar as safety sensors. Even when performing harvesting work, the AI camera with the massive volumes of data it has learned can analyze images to detect people and obstacles hidden among crops, and the millimeter wave radar can spot other vehicles in the field. If something is detected, the machine suspends its harvesting work and stops its automatic movement.
Technologies that Provide Unmanned Operation and Make Work Precise and Efficient
When performing farm work using an Agri Robo tractor, tasks such as plowing, tilling, and seeding are performed using a variety of implements. To ensure that work is performed properly using these implements, they are designed for compliance with the international standard ISOBUS to enable smoother coordination with faster response.
With the Agri Robo rice transplanter, a work map is generated from the perspective looking directly down on the field from above in order to enable highly efficient transplanting work. Based on this map, a logical route is designed, and an efficient planting order is calculated. During the work, rice is planted evenly and beautifully using the automatic row spacing function with Kubota’s exclusive algorithm.
-
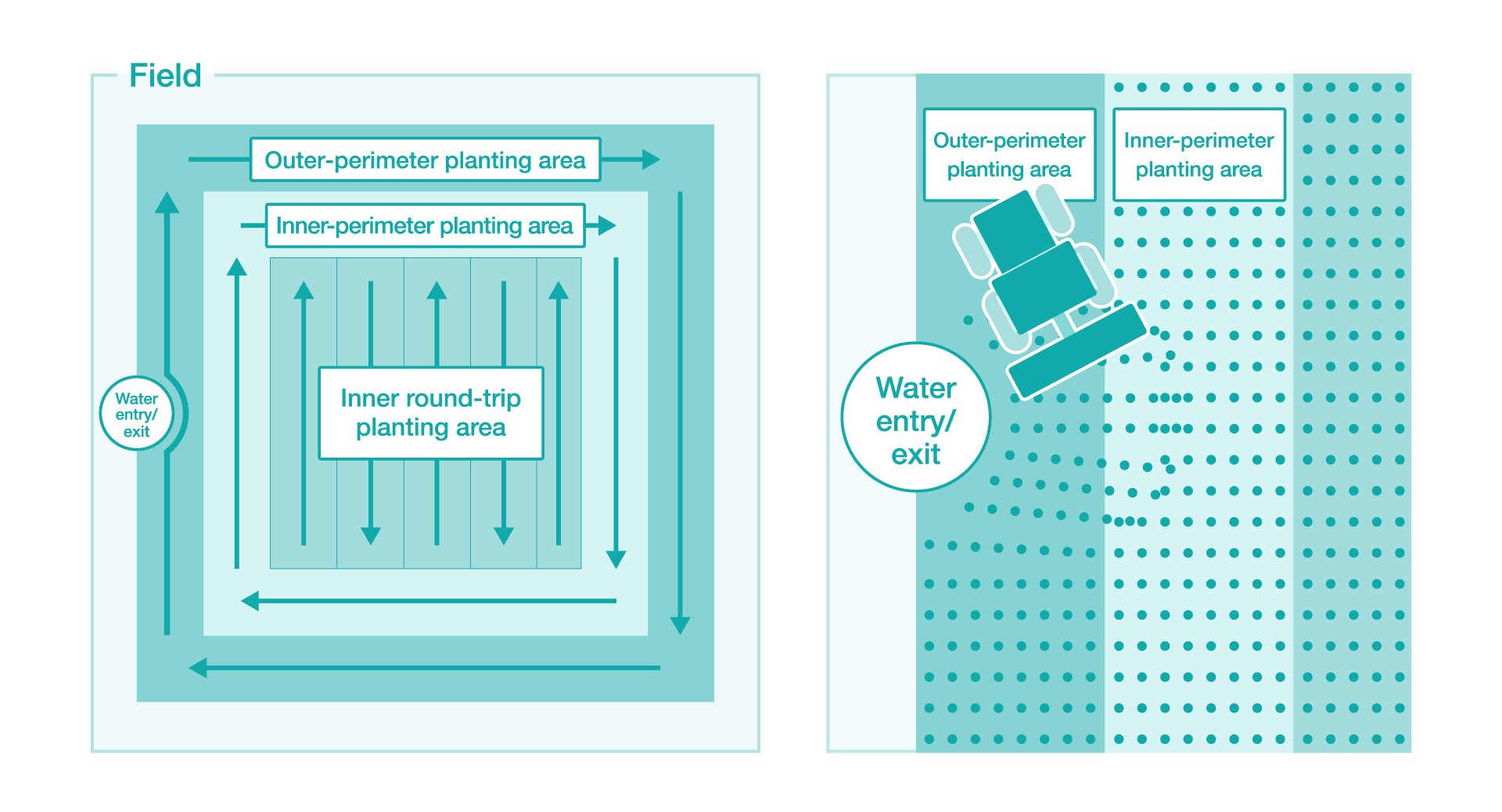
This shows a transplanting route design automatically generated by the Agri Robo rice transplanter (left). Even if there are overlapping parts in the route to avoid the water entry/exit, planting work is performed automatically with no overlaps (right).
When doing harvest work with a combine harvester, some crops, such as rice and wheat, may fall over. As the angle of toppling becomes deeper, more advanced skills are required to harvest the crops properly using a combine harvester. The Agri Robo combine harvester automatically adjusts the height of the blades and reel along with its speed according to the height of the crops as captured by the laser sensor. It can handle angles of up to 60 degrees, which is considered difficult to harvest, allowing even inexperienced workers to harvest just like seasoned experts.
The Agri Robo combine harvester is also equipped with a taste and yield sensor that works in concert with the Farm Management Information System (FMIS), a precision agriculture system). It can sort crops by moisture and protein content at the time of harvesting, making the subsequent drying work much more efficient. Plus, it can obtain data on drying and measurements and link it with FMIS, enabling its use in the following year’s fertilization plans.
Initiatives to Achieve Step 3 for Even Greater Efficiency
Kubota is involved in the following initiatives for achieving Step 3 of unmanned and automated operation of agricultural machinery.
- Improving obstacle and nearby object recognition features using AI image recognition
- Setting up infrastructure for high-speed communications in agriculture and ensuring communication stability and responsiveness
- Utilizing 3D maps to build road driving technologies including passing control
- Identifying farm roads and field infrastructure (signs, sensors, etc.) for unmanned driving between fields
- Providing remote monitoring and control for multiple agricultural machines and building an optimized operation management system
In the past, Kubota has participated in the SIP (Strategic Innovation Promotion) program with the National Agriculture and Food Research Organization, Hokkaido University, and other parties, along with an industry-government-academia consortium in Iwamizawa City, Hokkaido, Japan . The company is developing and demonstrating remote monitoring and control systems as it aims to achieve Step 3.
As it works toward the achievement of Step 3, Kubota is involved in numerous other initiatives, such as promoting the expansion of unmanned automated agricultural machinery into fruit growing and other areas that now have few automation solutions; expanding the range of unmanned automated agricultural machines; improving the unmanned rate of agricultural machinery as enabled in Step 2; and further advancements in sensing. Through these efforts, Kubota aims to enable farm work with greater precision and efficiency.
Related Articles